
Do desert ants travel in a straight line from point A to point B?
Desert ants have always been a frequent visitor in math problems, because they always need to walk from point A to point B, and then calculate their shortest walking distance. They can walk on a cube, or two cubes, or even a cylinder…
In any case, the premise for solving the problem is based on the premise that ants walk in a straight line, but in reality, do all ants really walk in a straight line?
Before answering this question, we must first shift the topic to the desert.
The desert is one of the easiest places to get lost. There are few visual clues to navigate, other than the sand and the sun. Much of the terrain looks similar, which makes it difficult to find your way around.
Not to mention the strong winds in the desert, the blowing sand will not only change the terrain but also block the view. The wind and sand may also cover the traces of walking, making it difficult for people to find the way back.

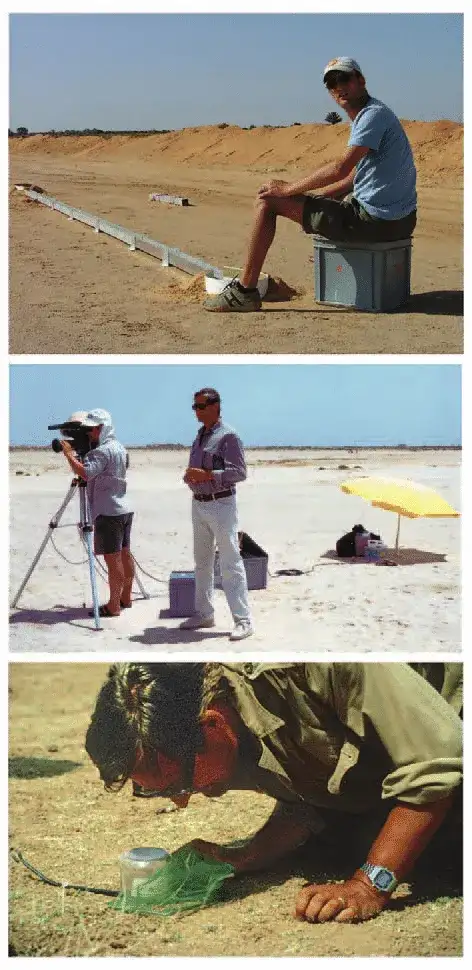
But for the long-legged desert ants ( Cataglyphis fortis ) living on the vast salt plains of Tunisia , finding the way is a common thing. After all, if they can’t find the way, they can’t survive in the desert and would have been extinct long ago. They usually act alone and go out alone to find some insect carcasses as food. Sometimes the foraging distance can reach tens or even hundreds of meters. After finding the food, they bite it with their jaws and drag it to the nest.

So how do they find their way home?
Harald Wolf began studying the navigation of desert ants in 2000, when he discovered that the ants’ paths home were rarely straight.
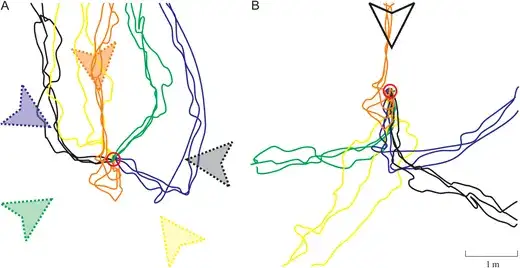
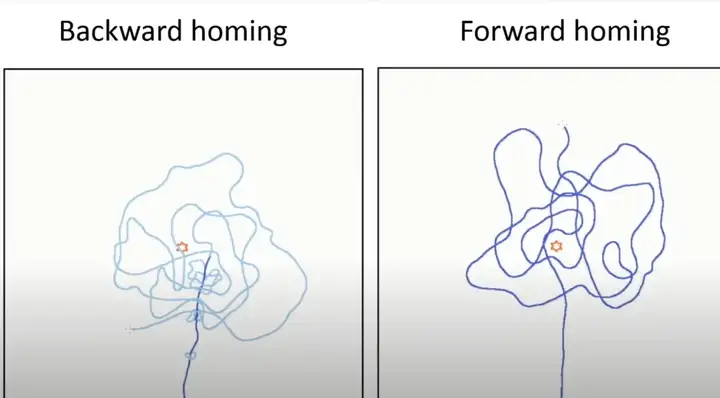
Scientists have discovered that whether the desert ants are walking headfirst or dragging food backward, they will show a graffiti-like curved trajectory (see the picture below), with almost no pattern to it, except that when walking forward, the path lines look slightly smoother.
According to the results of this article, desert ants can effectively combine visual and odor cues to locate food sources. This is just the initial experimental result. After 20 years of continuous research, Wolf found that the navigation ability of desert ants is very complex, not just simple visual cues and odor cues, but also path integration and solar navigation.
Path integration is the main navigation method. We can think of this process as a kind of “ant GPS”. How do scientists know this? They conducted an experiment to change the leg length of ants. They increased the leg length of some ants and installed “little stilts” to make them take bigger steps. For others, they reduced the leg length and shortened the legs of ants to make them take smaller steps. Then they laid sand on the experimental site and recorded the walking paths of the ants. Scientists observed and recorded the walking paths of ants from their nests to the food points.


Scientists
Scientists calculated the total distance and direction of the ants’ travel by recording their walking direction and number of steps. All the paths of the ants were synthesized to obtain the straight-line distance and direction of their return to the nest. They found that when the ants’ step length was changed, the location of their return to the nest changed. This shows that ants rely on the number of steps and stride length to calculate the distance traveled.
You can imagine a desert ant setting out from its nest to find food. It first walks 50 steps east, then 30 steps north, and finally 20 steps west to find food. Its path is like a zigzag. Now it wants to go home, and it will calculate a direct path home, which may be 30 steps south, then 30 steps west.
This is also the direct reason why desert ants cannot walk in a straight line. The combination and interaction of multiple navigation mechanisms cause the ants to deviate from the straight line.
In the latest research, scientists found that in some cases the paths of ants are not only not straight lines, but also tortuous and irregular, showing the characteristics of random walks, similar to Brownian motion .

Tracking
They further measured changes in path angles by tracking and recording the paths that the ants took to find food and return to their nests. They divided the ants’ paths into small segments, each about 50 centimeters long, and measured the changes in angles between each segment. For example, if the ants first walked east and then north, the angle between the two directions was 90 degrees.
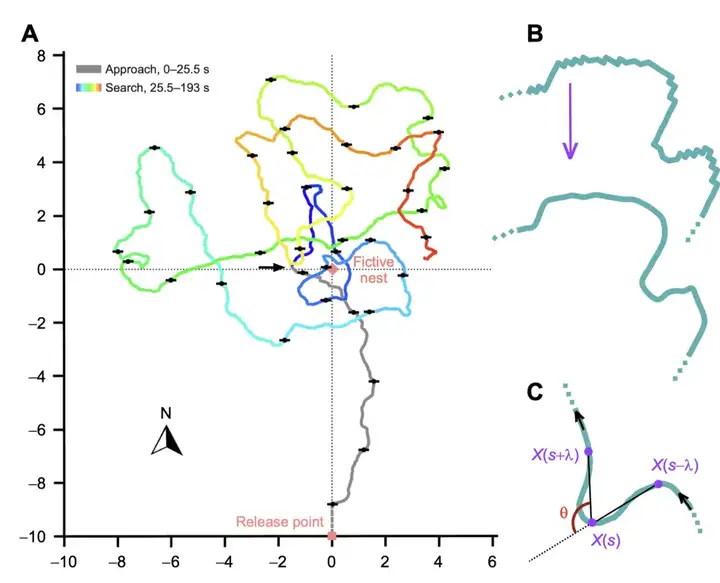
Afterwards, scientists conducted a statistical analysis of all the angles and calculated the average and distribution of the angles. The results showed that these angles were evenly distributed between 0 and 360 degrees, indicating that the paths of desert ants are random, similar to Brownian motion. Of course, the Brownian motion characteristics of desert ants do not appear in all search actions, but they mainly start searching when they cannot find the target. At this time, their walking paths show obvious Brownian motion characteristics.
When approaching the target, that is, when approaching the nest and feeding point, the path of the desert ants will slowly become straight. In other words, as soon as the desert ants go out, they are almost all random Brownian motion, and only when they find food and are close to the door of their home will they slowly become straight.
In 2019, French scientists were inspired by desert ants and designed a robot called AntBot. That can navigate autonomously without GPS and find its way back to base. The robot weighs 2.3 kilograms, has six legs, and can move on rugged terrain.
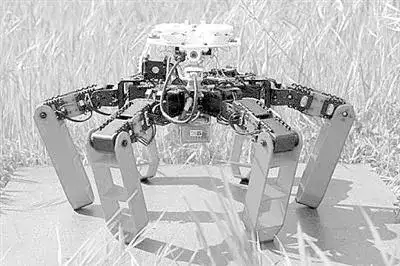
The antbot
AntBot is equipped with an optical compass that senses polarized light from the sky . This compass can measure direction with an accuracy of 0.4 degrees in sunny or cloudy weather conditions. The robot is also equipped with an optical flow sensor to measure relative motion. This sensor calculates the distance traveled by observing changes in the texture of the ground. Similar to the path integration mechanism of ants, AntBot also counts its steps to accurately calculate how far it has walked.
In the experiment, AntBot was able to randomly explore in a complex environment. It return to its starting position accurately with an error of no more than 1 cm. Who would have thought that one day, robots would no longer need GPS to navigate. All of this was inspired by the tiny desert ants.